Y dónde está el piloto
Prometen revolucionar la robótica móvil. Son vehículos aéreos no tripulados que vuelan por sus propios medios y pueden auxiliar a las personas en tareas complejas. Conocidos comúnmente como “drones”, aparentan ser la nueva moda en el aeromodelismo y las filmaciones de eventos. No obstante, existen interesantes usos de estos robots en el campo de la salud, la agricultura y el medio ambiente. Una exploración al desarrollo tecnológico que toma altura.

En los últimos años el uso de vehículos aéreos no tripulados cobró popularidad a partir de la reducción de los costos de sus componentes principales y la relativa facilidad para operarlos. Foto: Richard Unten.
¿Es un pájaro, un avión? No, es un VANT, un vehículo aéreo no tripulado (UAV en inglés) capaz de volar por sus propios medios, y que no transporta al piloto que lo navega. Existen dos modelos principales: los de ala fija (se asemejan a pequeños aviones) y los de hélices (multicópteros cuya cantidad de rotores puede variar). Como muchos otros desarrollos tecnológicos, comenzó con las investigaciones militares, especialmente en el campo de la inteligencia.
En los últimos años su uso cobró popularidad a partir de la reducción de los costos de sus componentes principales –control remoto, antenas, cámaras de video–, la miniaturización de sus componentes y la relativa facilidad para operarlos.
Por su mención constante en los medios masivos de comunicación, empezó a ser reconocido por la palabra drone. Etimológicamente la palabra proviene del término en inglés, que significa abeja o zángano. El sonido característico de los drones es el del zumbido; eso explica la analogía con la naturaleza ya que parece imitar el zumbido de las abejas durante su vuelo.
Los drones se volvieron más codiciados cuando aparecieron como un producto de consumo en cadenas de electrodomésticos y sitios de comercio electrónico de Argentina. Hoy en día, los aficionados tienen la posibilidad de volar cuadricópteros (drones de cuatro hélices) livianos y con baja autonomía de vuelo. También es común observarlos en un espectáculo al aire libre, donde se utilizan para filmaciones. Todo ello emulando a un avión a control remoto, aunque un poco más sofisticado, ya que no son un “juguete”, ni mucho menos (ver recuadro Regulación para el uso de drones en Argentina). No sería ficticio pensar que, en un futuro próximo, estos nuevos robots convivan en el espacio aéreo con otros vehículos.
Pero, dejando la futurología de lado, en Argentina, como en otros países, los robots vigías para defensa, seguridad y control están en el centro de la escena. El proyecto SARA (Sistema Aéreo Robótico Argentino) surgió en 2010 por iniciativa del Ministerio de Defensa, con el objetivo de dotar a la defensa nacional de sistemas aéreos no tripulados para la vigilancia de los grandes espacios aéreos, terrestres y marítimos del país. Para ello INVAP se encuentra trabajando en el desarrollo de los primeros modelos de VANT. Al mismo tiempo, desde hace dos años existen drones para realizar actividades de fiscalización por parte de los organismos de control tributario. La Agencia de Recaudación de Buenos Aires (ARBA) recurrió a uno de ellos para detectar propiedades no declaradas en distintas zonas de la provincia y notificar a sus dueños de sus obligaciones tributarias. Lo hecho por la agencia recaudadora no hizo más que seguir los pasos que ya se habían dado en otras entidades. Por ejemplo, en 2013 el Municipio de Tigre incorporó estos vehículos para complementar tareas de seguridad ciudadana.
Científicos de alto vuelo
En las universidades e institutos de investigación nacionales relacionados con robótica móvil –caracterizada por robots que interactúan con su entorno– se están desarrollando nuevas aplicaciones para los robots aéreos. Ejemplo de ello es el Laboratorio de Robótica y Sistemas Embebidos de la Facultad de Ciencias Exactas y Naturales de la UBA.
“A partir del vínculo con investigadores de República Checa, pudimos ver cuáles eran los temas principales de investigación y conocimos los primeros robots aéreos que trajimos a la universidad, que son los Parrot AR.Drone. Compramos dos para el laboratorio y así empezamos los primeros trabajos en el tema, llegando a desarrollar nuestro propio prototipo de cuatro hélices”, puntualiza Pablo De Cristóforis, investigador del laboratorio en Exactas-UBA.
“Para hacer volar este cuadricóptero desarrollamos un algoritmo que tiene dos niveles: uno que controla que el vehículo se mantenga en la misma posición, estable en altura y velocidad, controlando cada uno de los motores, y otro de mayor nivel que debe resolver el problema de la trayectoria, cómo ir de un lugar al otro, para lo que utiliza las cámaras y sensores de movimiento”, explica De Cristóforis, quien realizó en Exactas su doctorado en computación sobre robots móviles.
“La ventaja de estos algoritmos es que tienen la capacidad de adaptarse a cambios, tanto internos del dispositivo como del ambiente, por lo que el propio vehículo va modificando su acción de acuerdo a la tarea que se espera que realice”, agrega De Cristóforis.
A diferencia del uso de un sistema de posicionamiento global o GPS –que sería la forma más simple de guiar al autopiloto del robot en un mapa– en el Laboratorio de Robótica desarrollaron un método de navegación autónoma basado en visión para robots aéreos del tipo multicóptero. Ese fue el tema central de la tesis de doctorado de Matías Nitsche, investigador y docente de Exactas. “La idea principal de trabajar con visión, con respecto a un GPS, es que en general el GPS solo funciona en un entorno exterior”, aclara. “Entonces, tanto para el espacio interior de un edificio o para un espacio exterior donde hay muchos obstáculos que suelen bloquear la señal de GPS, resulta necesario tener otro tipo de métodos de sensado como la visión, que provee mucha información del ambiente y la procesa en tiempo real, facilitando al robot guiarse por sí mismo”.
Para desarrollar este tipo de navegación autónoma, Nitsche aplicó una técnica que se llama “teach and replay” (enseñar y repetir). Su objetivo era que el robot pueda repetir un camino lo mejor posible, que ya fue previamente aprendido a partir de que se le enseña la ruta que debe cumplir para una tarea.
Teniendo en cuenta esta investigación, una de las aplicaciones que se está desarrollando en Exactas es un sistema de monitoreo de bosques nativos utilizando VANT. El proyecto se lleva a cabo en forma interdisciplinaria entre el Laboratorio de Robótica y Sistemas Embebidos, el Grupo de Estudios de Sistemas Ecológicos en Ambientes Agrícolas y el Grupo de Procesamiento de Imágenes y Visión por Computadora, en el marco de la convocatoria PICTO 2014. “En el bosque chaqueño, que es donde aplicaremos este sistema, los ingenieros agrónomos hacen un relevamiento a pie o se utilizan imágenes satelitales que no tienen una periodicidad. Entonces nunca se llega a tiempo de evitar una deforestación”, comenta De Cristóforis. “Tampoco se cuenta con la cantidad de ingenieros suficientes para relevar las especies de todas las provincias, con lo cual no se termina cumpliendo la Ley de Bosques”.
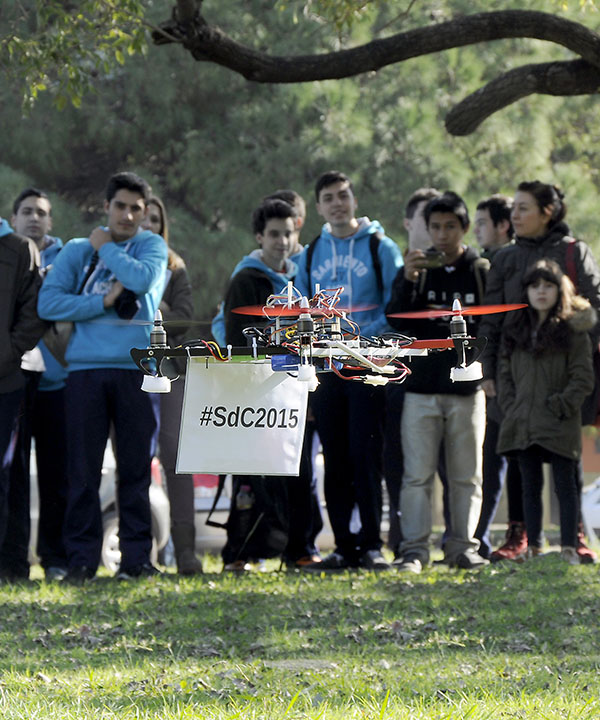
Prueba del funcionamiento de un cuadricóptero durante la Semana de la Computación, que se realiza todos los años en Exactas UBA. Foto: archivo Exactas Comunicación.
El proyecto involucra utilizar drones para tomar fotografías, registrando nuevas imágenes de la superficie del bosque y con esa información generar un mapa para conocer las zonas donde haya agujeros, identificando y clasificando cada especie de árbol. Esto complementará el trabajo humano para relevar zonas deforestadas. Llegado el caso, la tarea se podría hacer coordinada con varios drones volando al mismo tiempo. Desde el laboratorio de Exactas explican que también han tenido consultas para utilizar este tipo de tecnologías en detección de incendios forestales, conteo de poblaciones de animales en peligro de extinción y monitoreo de líneas de alta tensión.
Por otra parte, en el Instituto de Automática –perteneciente a la Universidad Nacional de San Juan y el CONICET– unos diez investigadores se encuentran trabajando con robots aéreos multicópteros en aplicaciones de agricultura de precisión. “Contamos con diferentes proyectos que permiten generar un mapa georeferenciado del estado de los cultivos, hacer un seguimiento de los mismos mediante índices de estado vegetativo, de estrés hídrico y saber con precisión qué cantidad de agroquímicos aplicar en cada sector”, precisa Ricardo Carelli, director del Instituto de Automática, docente e investigador.
Desde el Instituto de Automática colaboran conjuntamente con el INTA Regional San Juan, en el monitoreo de cultivos de frutales y vides mediante robots a hélice. También están por transferir su tecnología a una empresa nacional de semillas de maíz, que necesita hacer un monitoreo preciso del estado de las plantaciones que suelen ser afectadas por plagas. Todo ello apunta a complementar el trabajo que ya vienen realizando los ingenieros agrónomos desde la superficie terrestre. “Ya hemos desarrollado tres prototipos de drones, que fueron sometidos a pruebas de vuelo y al testeo de los algoritmos de seguimiento servovisual. Desarrollamos todo el software y el sistema de visión que permite la navegación con cámaras para hacer un seguimiento preciso de las plantaciones”, explica Carelli, quien es doctor en ingeniería eléctrica.
Y anticipa que “el futuro de la robótica móvil tiene que ver con imaginar cómo robots y humanos compartirán un mismo espacio de trabajo y, en cuanto a la investigación en particular, cómo combinar la supervisión humana con la operación autónoma de los robots”.
El dron ambulancia
Otro interesante proyecto es el uso de un dron que asiste rápidamente en emergencias médicas, creado por médicos e ingenieros de la empresa Medivac. La iniciativa surgió a partir del modelo RoboKopter, un aparato polaco que los inspiró a adaptar un desarrollo local que pudiera actuar en situaciones donde es fundamental una rápida respuesta, tales como accidentes en rutas, incendios, derrumbes, catástrofes naturales o lugares con concurrencia masiva (un partido de fútbol o un recital). El desarrollo de los prototipos se está realizando en conjunto con la empresa Aero Spacio Films.
“Tenemos un dron ambulancia ya testeado, un exacóptero que puede cargar un desfibrilador, un botiquín de primeros auxilios, una cámara 4K que puede transmitir en vivo y un micrófono con parlante para comunicarse con un asistente”, precisa el médico Diego Pereyra, CEO de Medivac y alma mater del proyecto.
La idea de Medivac llegó hasta el club de fútbol Boca Juniors, que quiere convertirse en el primer estadio del mundo en tener un dron ambulancia con desfibrilador, para poder asistir rápidamente a los espectadores y evitar muertes súbitas. Este robot de seis hélices, modelo DJI, puede alcanzar una altura de 400 metros. “Hicimos el simulacro del dron ambulancia en la cancha de Boca y todo salió perfecto. Este auxilio reduce considerablemente los tiempos de una emergencia. Al mismo tiempo estamos trabajando con empresas de medicina privada que cuentan con el servicio de ambulancia y con empresas nacionales de tecnología”, puntualiza Pereyra.
“Ya tuvimos un pedido de Defensa Civil de la provincia de Buenos Aires para ayudar en la búsqueda o asistencia de personas ante inundaciones”, agrega el médico. Y explica que si bien cuentan con todos sus prototipos operativos, en muchos casos los tiempos administrativos y legales no contribuyen a terminar de concretar estas solicitudes. “Sin embargo, el hecho de que la Administración Nacional de Aviación Civil (ANAC) ya haya reglamentado el uso de los drones es un avance”, concluye.
En todos los casos la principal desventaja de los robots a hélice resulta la autonomía de vuelo, debido a que utilizan baterías eléctricas y tienen una importante limitación en el peso de las baterías que pueden cargar. Estos robots vuelan solamente entre 20 y 30 minutos, a diferencia de los VANT de ala fija que, al utilizar combustible, su autonomía se extiende a unas dos horas. Sin embargo, al no poder detenerse en un punto fijo, los vehículos de ala fija están más limitados para cumplir las tareas asignadas a los modelos de hélice.
Por último, cabe recalcar que a los robots adquiridos comercialmente no se le pueden hacer modificaciones en su arquitectura. En muchos casos, eso llevó a los investigadores y emprendedores de los diferentes proyectos a desarrollar un prototipo propio, incorporándole una computadora de abordo para dotar al robot de mayor poder de procesamiento.
Regulación para el uso de drones en Argentina
En noviembre de 2015 entró en vigencia el Reglamento Provisional de los Vehículos Aéreos No Tripulados aprobado por la ANAC, Resolución 527/2015, que regula su utilización en el país para “velar por la seguridad operacional de todos los demás usuarios del espacio aéreo así como la seguridad de las personas y los bienes en superficie”; teniendo en cuenta que aun no existe una reglamentación internacional sobre el tema.
Claves del Reglamento:
-La ANAC clasifica a los drones de acuerdo a su uso. Los artefactos de “uso recreativo o deportivo” son aquellos operados por diversión, esparcimiento, placer y sin otra motivación. Esta definición excluye su uso para “la fotografía o filmación no consentida de terceros o de sus bienes o pertenencias; la observación, intromisión o molestia en la vida y actividades de terceros; la realización de actividades semejantes al trabajo aéreo”.
-Establece tres categorías de drones con respecto a su tamaño: los pequeños no pueden exceder los 10 kilos de peso vacío, los medianos pesan entre 10 y 150 y los grandes de más de 150 kilos.
-Los usuarios de aparatos de más de 10 kilos deben sacar un registro para usarlos en forma legal y están obligados a contratar un seguro de responsabilidad por los daños a terceros que pudiera ocasionar su operación.
-Quienes operen drones medianos y grandes deben “contar con aptitud psicofisiológica certificada por un hospital público, que dé cuenta de su aptitud visual y auditiva como así también de su motricidad fina”, requisito que se acredita cada dos años.
-Los menores de 16 años no pueden usar drones y aquellos que estén en la barrera entre los 16 y 18, solo podrán volarlos con la supervisión de un adulto. Además, el artículo 28 del reglamento advierte que “ningún miembro de la tripulación remota participará en su operación bajo los efectos del alcohol o drogas”.
-Los drones pueden operar “exclusivamente en horario diurno y en condiciones meteorológicas visuales que permitan su operación segura”; por lo tanto, los vuelos nocturnos están expresamente prohibidos salvo que cuenten con una autorización excepcional del organismo. Los vuelos acrobáticos quedan también cancelados.
-Los drones no pueden superar una altura máxima de 122 metros sobre el nivel del terreno. La ANAC también prohíbe la operación de vehículos aéreos pilotados a distancia en espacios aéreos controlados o dentro del área de influencia de aeropuertos.
Ficha técnica del Cuadricóptero de Exactas
Fue desarrollado en el Laboratorio de Robótica y Sistemas Embebidos, donde trabajan con VANT multicópteros, entre otras tipologías de robótica móvil.
-Dimensiones: radio de 40 cm aprox.
-Peso: 2 kilos
-Altura y velocidad: 500 metros de altura y velocidad de 5 mts. por segundo.
-Autonomía de vuelo: 20 minutos.
-Componentes básicos: cuatro motores, computadora de abordo Odroid, sensores de flujo óptico, sonar, unidades inerciales y cámaras estéreo. Los motores y toda la electrónica utilizada es estándar y de bajo costo.
-Software: 100% desarrollado en el Laboratorio. Tanto el software como el hardware siguen la filosofía open-software y open-hardware respectivamente.
-Navegación: cuenta con un método de navegación autónoma; no requiere que un operador lo pilotee ni depende de una ruta predefinida con GPS y puede volar tanto en ambientes exteriores como interiores.
Te puede interesar